原标题:我校2项科研成果在国家“十三五”科技创新成就展亮相
在建党100周年、“十三五”圆满收官和“十四五”开局之际,国家“十三五”科技创新成就展于10月21日至27日在北京展览馆举办,我校2项科研成果在本次成就展亮相。一是我校牵头研制的滑扑一体仿蝠鲼柔体潜水器(负责人:潘光教授)。二是我校牵头承担研制的海洋声学探测技术研究成果。(项目负责人:杨益新教授)。
本次展览以“创新驱动发展 迈向科技强国”为主题,全面展示我国“十三五”以来贯彻落实党中央关于科技工作重大决策部署,深入实施创新驱动发展战略、建设创新型国家所取得的重大成就,彰显科技创新在我国经济社会发展中的重要支撑引领作用。
据悉,本次展览总面积达21834平方米,共设展项1740项。现场共分12个展区,分别为总序、百年回望、基础研究、高新技术、重大专项、农业科技、社会发展、区域创新、改革(人才)、开放合作、科普等展区,展现了一大批高精尖的重大科技成果,体现了科技支撑高质量发展的新成效。
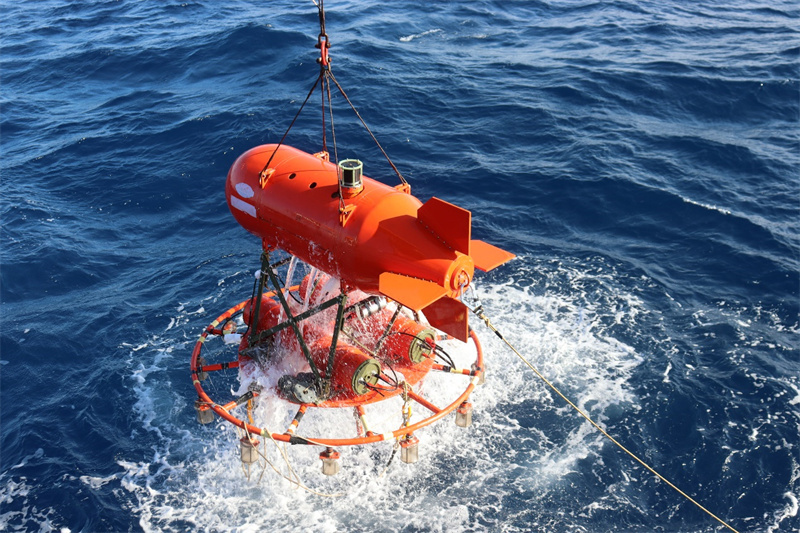
我校项科研成果在本次成就展亮相,向公众展示了我校“十三五”期间在科技创新领域取得的部分阶段性成就。一是我校牵头研制的滑扑一体仿蝠鲼柔体潜水器(负责人:潘光教授)。该项目受科技部国家重点研发计划“深海关键技术与装备”重点专项与“智能机器人”重点专项资助,研发的500公斤级滑扑一体仿蝠鲼柔体潜水器,成功完成世界首例大尺度仿生柔体潜水器1025米大深度滑扑一体航行试验,处于世界先进行列。


该型滑扑一体仿蝠鲼柔体潜水器,通过结合水下滑翔机低功耗滑翔运动与仿蝠鲼的超高机动扑翼运动,具有滑扑一体高效与高机动“双高”推进性、外形与运动姿态的“双重”高仿生性、低环境扰动与高生物亲和性的高隐蔽性等特点;能够实现1000km滑翔航程与扑动原位高机动,有效解决了目前传统水下航行器长航程与高机动难兼顾的卡脖子问题,突破了蝠鲼生物解剖结构与运动姿态分析、滑扑一体仿生流体推进机理、多自由度刚柔并济仿生扑翼结构设计、神经仿生协调运动与自主抗扰控制等多项核心尖端技术。
这款仿蝠鲼潜水器具有长续航、高机动、高隐身、高生物亲和性的特点,满足广域粗维度+原位细维度监测需求,可应用于各种水下环境监测、海洋大数据采集、海洋牧场养殖等场景。目前已经开始和相关单位合作,对西沙北礁珊瑚开展了环境监测,并采集了周围1000米深度海域温度、盐度、深度等水文信息。

二是我校牵头承担研制的海洋声学探测技术研究成果。 “海洋声学探测技术”项目(负责人:杨益新教授)在国家重点研发计划“海洋环境安全保障”重点专项支持下,针对国家海洋环境安全保障对海洋声学探测技术的迫切需求,历时4年,突破了传感器阵列超指向性处理、MIMO声学探测、多源声学信息融合等水下信息处理技术,研制了由固定节点、移动节点及组网系统构成的分布式水下信息感知与处理系统,有力提升我国海洋信息获取及环境安全保障的能力,对促进海洋探索、开发及利用至关重要。
展览期间,我校的科技创新成果受到参展人员的广泛关注与肯定。
“十三五”以来,我校聚焦国家战略需求和世界科技前沿,不断完善科技创新体系、深化体制机制改革、激发创新主体活力,全面提升科技创新能力,取得了一系列重大及原创性科技创新成果。在“十四五”开局之年,我校将加紧布局、加强统筹,持续强化学校在科技自立自强和科技强国建设中的责任与担当。
审核:孙华强



 科学研究
科学研究